Wisselsturingen
Deze bijdrage verscheen in Modelspoormagazine 67. Meer afbeeldingen en tekst vindt U daar ...
Er bestaan verschillende manieren om modelwissels om te zetten: manueel of aangestuurd, verdekt opgesteld of niet, snel of langzaam, stil of luidruchtig, met of zonder terugmelding, met of zonder extra schakelcontacten, … In een zoektocht naar de ideale wisselaandrijving kwam ik uiteindelijk tot een zelfgebouwde wisselmotor...
Een wisselaandrijving … hoezo?
Er bestaan vele manieren om een modelspoorwissel om te zetten. We maken allereerst een onderscheid tussen manuele en gemotoriseerde aandrijvingen.
Manueel worden wissels in de modelbouw op twee wijzen omgezet: een klein schuifkastje vlakbij je wissel zelf (meestal bovengronds) of een systeem met trekstangen of –draden, die meestal verdekt worden gebruikt. Een manuele aansturing vlakbij een wissel kan zeker zijn voordelen hebben, maar dit is vooral voor grotere emplacementen al gauw wat moeilijker, al is het alleen maar omwille van de bereikbaarheid. Een zichtbaar “kastje” naast een wissel is trouwens ook niet echt voorbeeldgetrouw.
Wat de gemotoriseerde aansturing betreft, is die net als in het grote voorbeeld meestal elektrisch.
Binnen de elektrische aandrijvingen bestaan er ook weer drie soorten aandrijfmethoden: met magneetspoelen, met geheugendraad of met behulp van een elektromotor.
Wanneer is een wisselaandrijving ideaal?
Dit is uiteraard een vraag die ieder voor zich moet uitmaken, maar toch wens ik enkele gewenste eigenschappen op een rijtje te zetten:
- Op afstand te bedienen
- Verborgen
- Elektrisch
- Geschikt voor meerdere schalen
- Compact
- Degelijke constructie
- Krachtig
|
- Geluidsarm
- Langzaam
- Afregelbaar
- Een correcte terugmelding
- Extra schakelcontact(-en)
- Eenvoudige bedrading
- Betaalbaar
|
Ben ik nu al te veeleisend voor de kwaliteiten van een wisselaandrijving? Misschien wel, misschien ook niet.
In ieder geval ben ik van dit lijstje, en van een lichte ontevredenheid over commerciële producten, vertrokken om zelf iets te ontwerpen.
Het ontwerp: een overzicht
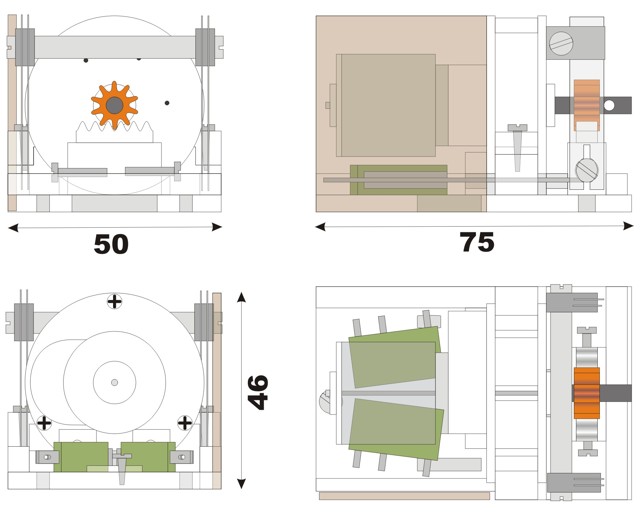
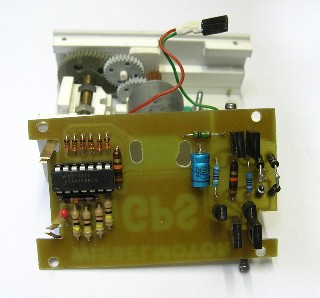
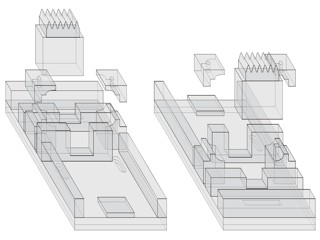
Het geheel bestaat uit een chassis uit resin, waarop een gerecycleerd en licht aangepast motortje met tandwielvertraging wordt geplaatst. Op dit frame wordt door deze motor een blokje met tandwielheugel bewogen. De beweging van dit blokje veroorzaakt het omschakelen van één of twee microschakelaars. De beweging zelf wordt aan de uiteinden bewaakt door twee schakelcontacten.
Verder zorgt een printje met wat elektronische componenten voor de logische aansturing en de stroomvoorzienig van het geheel.
|
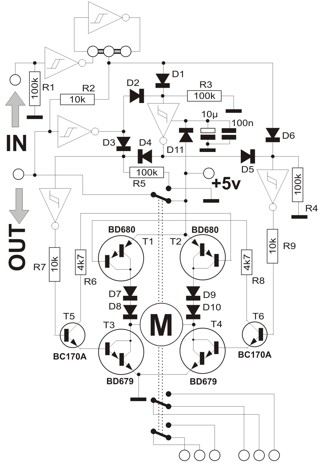
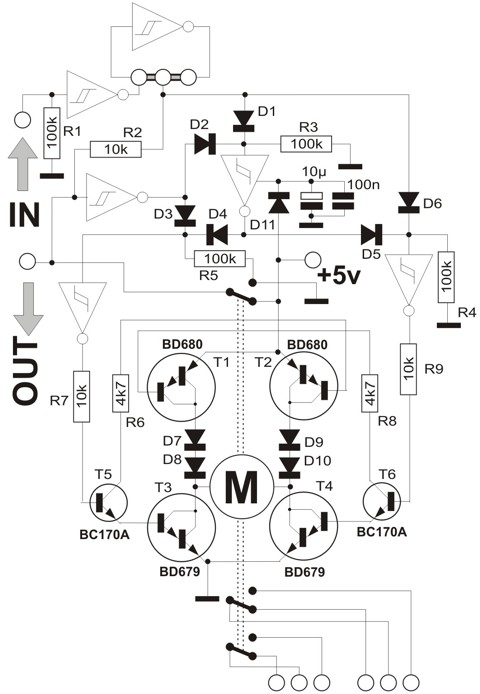
Het schema lijkt mogelijk erg ingewikkeld.
Bovenaan bevindt zich de meet- en regelelektronica. Slechts één IC en wat diodes met weerstandjes verzorgen het verwerken van het ingangssignaal, de aansturing en het in de gaten houden. Verder levert dit geheel ook een logische uitgangs voor de terugmelding.
Het onderste deel met de transistors vormt een zogeheten H-brug. Deze verzorgt de regelspanning voor het motortje.
|
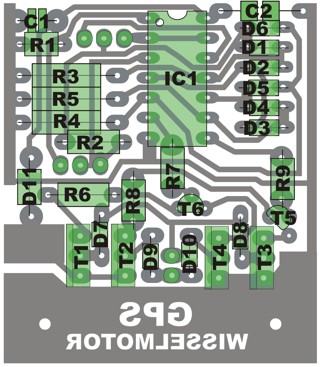
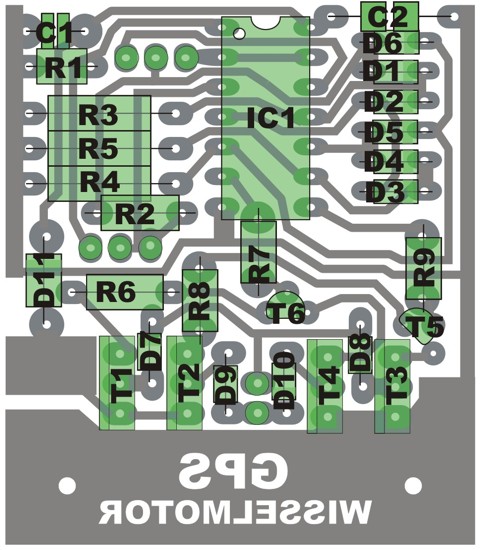
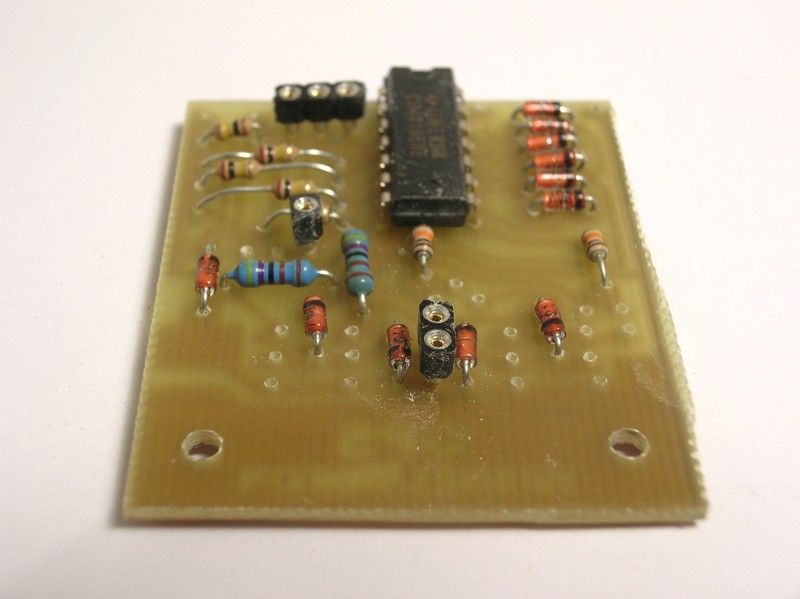
Een print-layout en de plaatsing van de componenten zie je op deze tekening. Zoals je ziet is een compacte opbouw nagestreefd. Om een dergelijk plaatje te maken is het fotografisch etsen eigenlijk de beste methode. Voor de geoefende elektronicus is deze informatie voldoende om aan de slag te gaan.
|
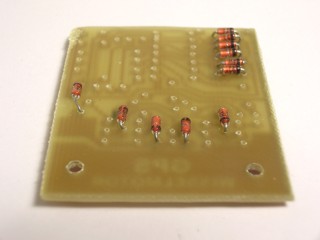
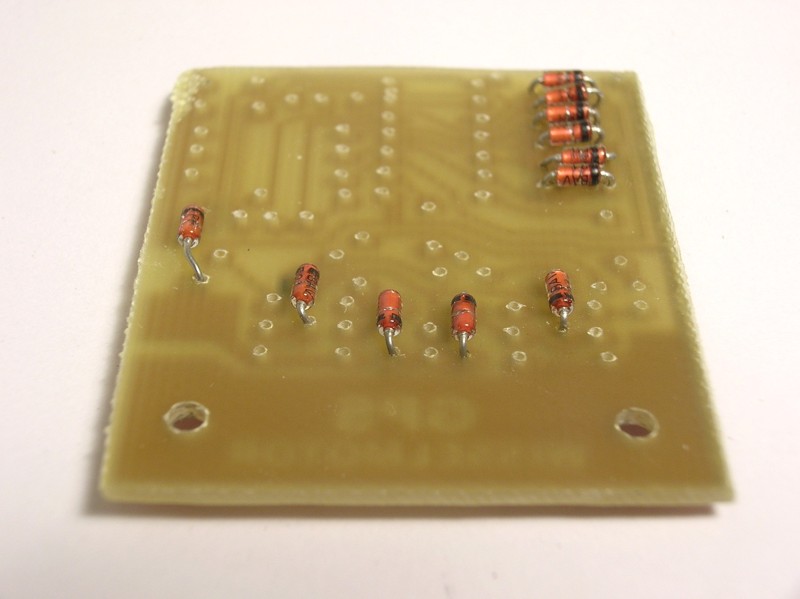
Na het boren van de gaatjes voor de onderdelen bouwen we de print op, beginnend met de onderdelen die de minste hoogte innemen. Bij dit ontwerp zijn dit de signaaldiodes (type 1N4148). Let op de polariteit van deze onderdelen bij het bestukken van de print. Eens ze op hun plaats gestoken zijn kan je de printplaat omdraaien, ze vast solderen en de losse draadeinden afknippen. |

Een iets dikkere component – hoewel het niet veel scheelt – zijn de weerstandjes. Daarna komen enkele printconnectoren en het 14-polige IC aan de beurt. Let bij de plaatsing van het IC op de juiste oriëntatie van dit onderdeel, maar ook op risico’s op statische elektriciteit.
|
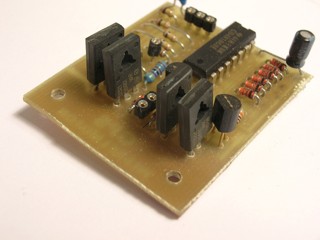
De condensatoren en de kleine transistors zijn weer een stapje hoger op de printplaat, en komen nu aan de beurt. Bij deze componenten moet je ook goed op de plaatsing (polariteit) letten.
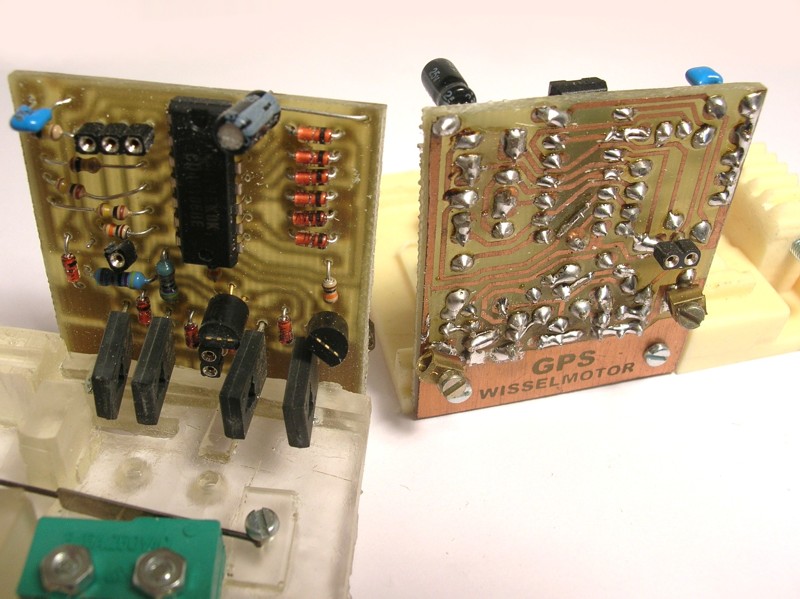
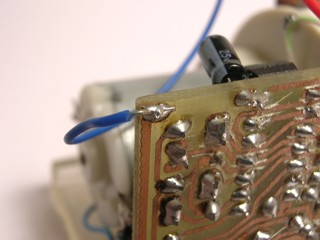
Als laatste elektronische component plaatsen we nu de eindtransistors. Ook deze moeten op de juiste manier georiënteerd gemonteerd worden. De foto helpt hierbij. Deze transistors hoeven niet van een koelplaat te worden voorzien.
Op de soldeerzijde van de printplaat komt nog één tweepolige printconnector. |

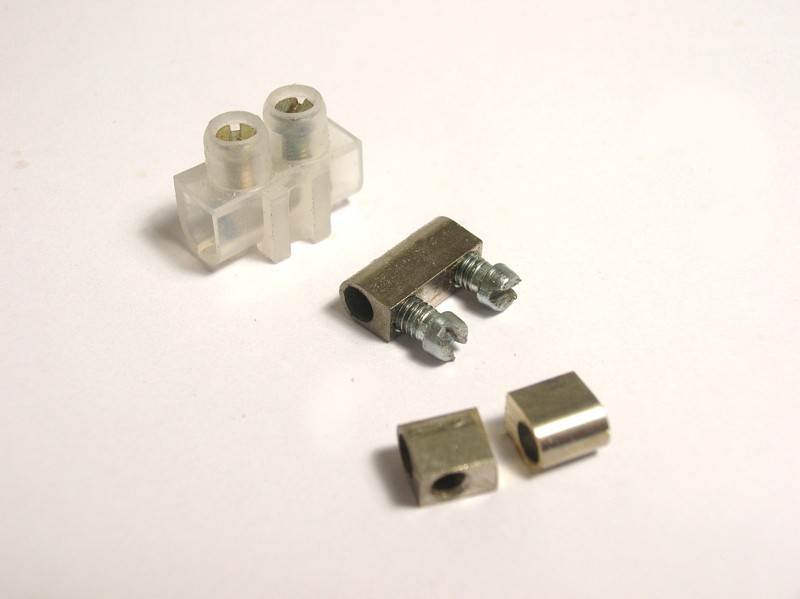
Onze printplaat heeft uiteraard nog een voedingsaansluiting nodig. Omdat er meestal meerdere motoren in mekaars buurt geplaatst worden, is het nuttig om een aansluiting te voorzien waarvan je eenvoudig kan aftakken. We maken een schroefaansluiting vanuit een kroonsteentje, waarvan we de kunststof verwijderen. We zagen vervolgens het koperen buisje middendoor. Door deze kroonsteenstukken vast te solderen op de grotere voedingsvlakken bekomen we een solide constructie.
|
De mechanische opbouw
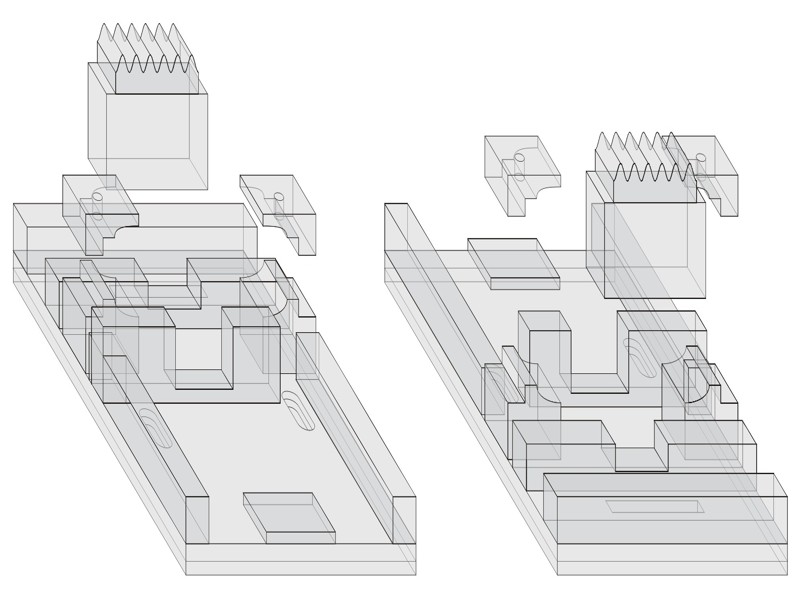
De opbouw van het chassis gebeurt met styreen. Met verschillende diktes styreenplaat en stukken profiel bouwen we de grondplaat op. Het verschuifbare blokje met tandwielheugel kan U volledig uit een groter blok vijlen, maar het is uiteraard gemakkelijker om een heugel van Opitec, gekleefd op een styreenblokje, te gebruiken. Let ook op de twee bevestigingsstukjes, waarmee de aandrijfmotor zal worden vastgezet.
|
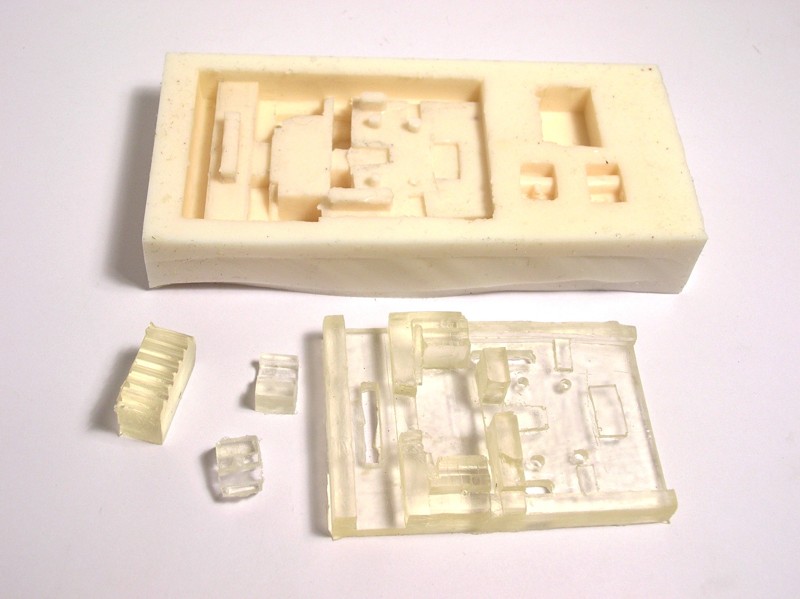
 Omdat we meestal meer dan één aandrijving nodig hebben, zijn een siliconenmal en afgietsels bijzonder geschikt. Het eerder opgebouwde chassis wordt dan het moedermodel. We hebben omwille van meer aanschouwelijke foto’s een afgietsel gemaakt uit helder resin, maar het klassieke giethars is uiteraard even bruikbaar. Dit resin is dus enkel bedoeld om op sommige foto’s de constructiemethodes beter te kunnen zien en begrijpen. Omdat we meestal meer dan één aandrijving nodig hebben, zijn een siliconenmal en afgietsels bijzonder geschikt. Het eerder opgebouwde chassis wordt dan het moedermodel. We hebben omwille van meer aanschouwelijke foto’s een afgietsel gemaakt uit helder resin, maar het klassieke giethars is uiteraard even bruikbaar. Dit resin is dus enkel bedoeld om op sommige foto’s de constructiemethodes beter te kunnen zien en begrijpen.
|
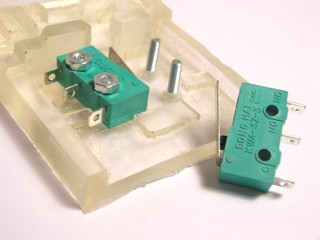
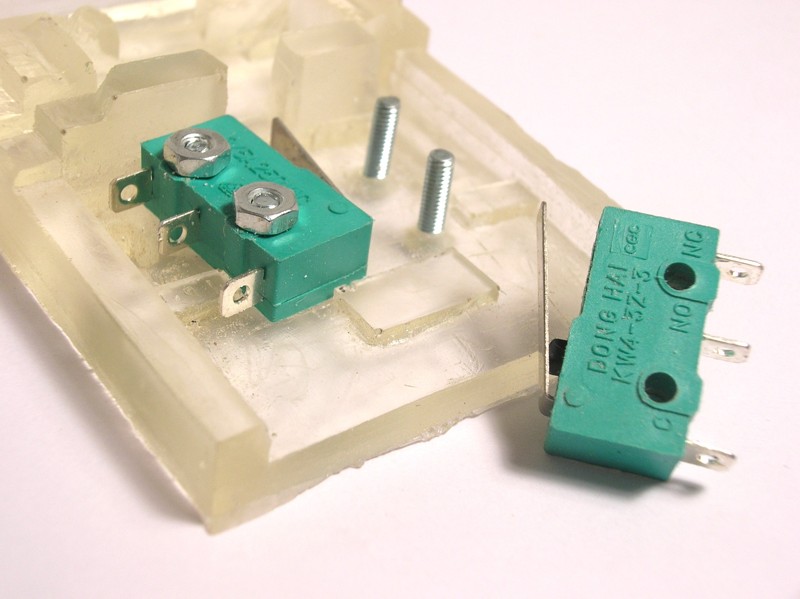
In het chassis moeten na het afgieten en uitharden nog enkele 2,5mm brede gaatjes geboord worden voor de bevestiging van de microschakelaars. Boor die aan de onderzijde mooi verzonken in de bodemplaat.
De microschakelaar kan nu geplaatst en vastgezet worden met enkele boutjes en moertjes. Er is ruimte voorzien voor een tweede microschakelaar, maar die zal in de meeste situaties niet nodig zijn. |

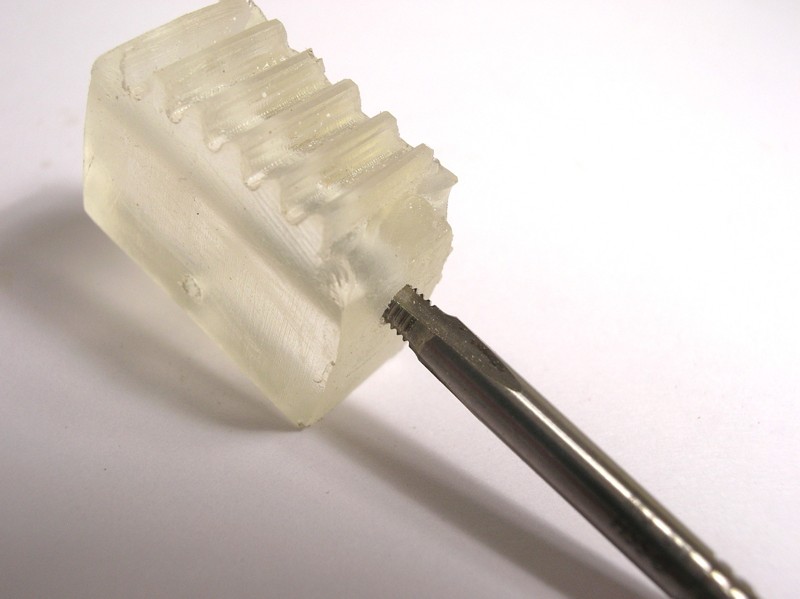
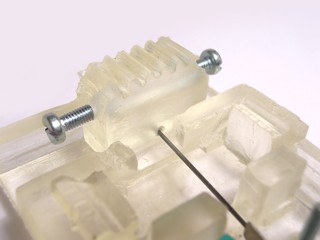
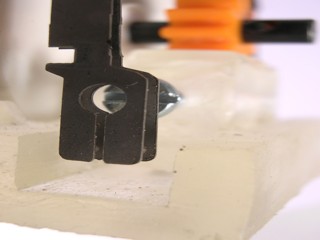
Werk het tandwielblokje indien nodig eerst wat bij: het dient goed passend, maar toch vlot tussen de geleidegleuf van het chassis te kunnen bewegen.
Het beweegbare tandwielblokje kan nu ook van boorgaten worden voorzien: Een eerste horizontaal gaatje van 1mm, dwars door het blokje in de lengterichting van het chassis, een tweede gat van 2,5mm doorsnede. In dit laatste boorgat gaan we M3-draad tappen vanuit de beide kanten van het blokje.
Dit getapte gat kan nu aan beide zijden van een M3-boutje voorzien worden. Met deze boutjes kunnen we later de maximale uitslag van onze wisselmotor afregelen. |

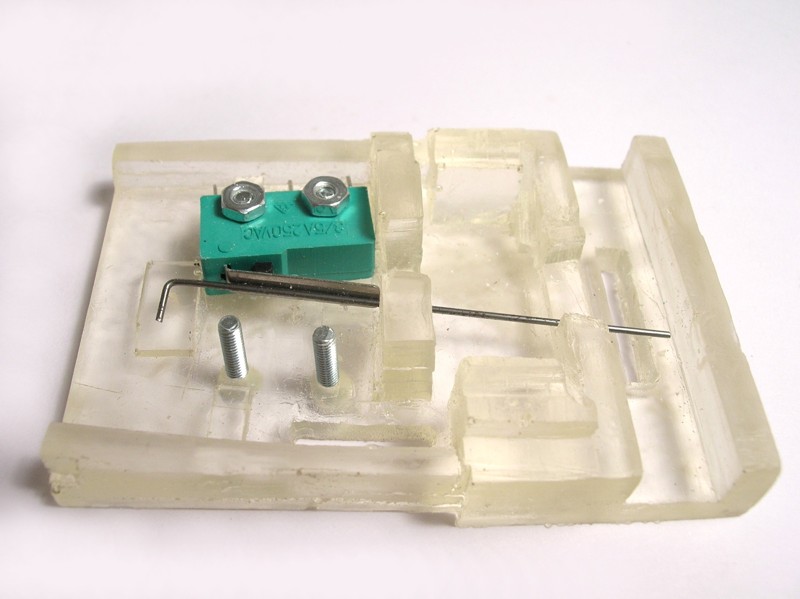
Datzelfde blok zal ook de microschakelaar omzetten. Om die reden brengen we met een stukje veerstaal van 1mm diameter een hefboom aan. We meten de lengte ervan af op het chassis, en buigen aan één zijde deze stang enkel millimeters haaks om.
Aan de kant van de microschakelaar boren we een 1mm-gaatje in het chassis, zodat onze veerdraad daarin kan scharnieren.
|
Het andere einde van onze veerstang kan nu in het tandwielblokje gestoken worden, en we kunnen de goede werking van de hefboom controleren. De microschakelaar moet omslaan wanneer het blokje rond het middelpunt van het chassis minimaal verschoven wordt. Een schroefje naast het scharnierpunt zorgt er voor dat de geplaatste hefboom na herhaalde bewegingen niet uit het scharniergaatje kan glippen.
We controleren het geheel opnieuw op een goede werking.
|

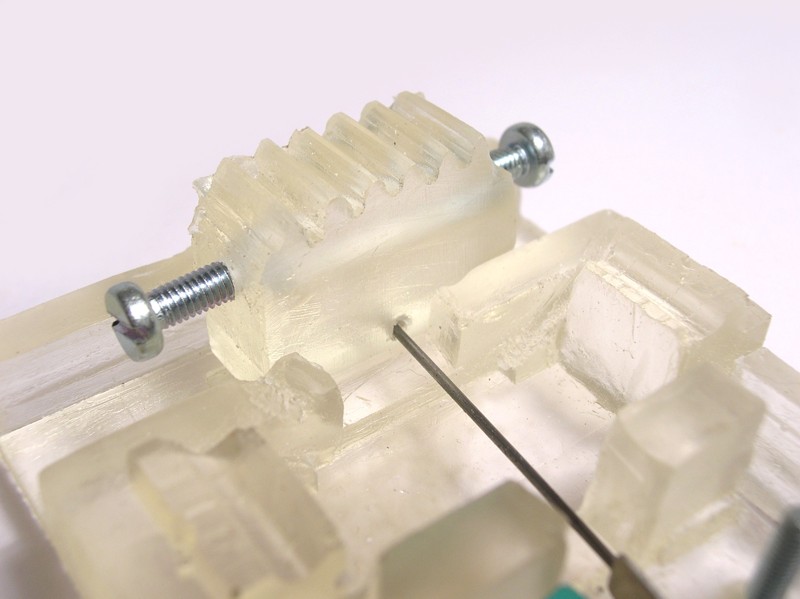
Nu kan de printplaat aan het chassis bevestigd worden. Enkele kleine schroefjes in voorgeboorde gaatjes – we willen immers niet dat ons chassis breekt door de druk van de ingedraaide schroeven - zijn voldoende voor een degelijke verbinding. Lijmen hoeft niet, en is zelfs af te raden: misschien moeten we later nog iets corrigeren en dan is de mogelijkheid tot demonteren toch wel nuttig. |

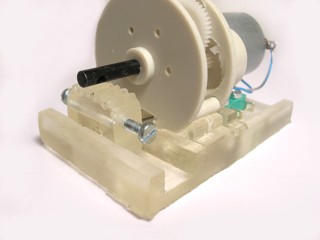
Het mechanische hart van de wisselmotor recupereren we uit een aandrijving voor een spiegelbol. De talrijke tandwielen zorgen voor een zeer trage omwenteling en tevens voldoende kracht. Het enige nadeel aan deze aandrijving is dat de motor werkt op 1,5 volt, maar dat probleem hebben we intussen elektronisch opgelost.
Aan het motortje solderen we twee nieuwe draden uit een gerecycleerde signaalkabel. De draadjes uit de foto zijn gerecycleerd uit een stuk UTP-kabel |

In de toekomstige onderzijde van het motordeel zagen we in de beide schijfvormige tandwielhouders inkepingen, waar de veerdraad van de microschakelaars tussendoor moet kunnen bewegen.
We sluiten de motor aan, en gaan alvast even proefdraaien. Op het printplaatje hebben we enkele bouwstappen geleden een driepolige connector naast het IC geplaatst. Deze connector bepaalt de draairichting “in rust”. We plaatsen een draadbruggetje tussen het linkse en het middelste gaatje van de connector. Deze zo bepaalde uitgangspositie kan je later nog veranderen, maar nu moet die even in deze stand geplaatst worden.
|
We sluiten de motor aan op de printplaat via de connector die zich tussen de grote eindtransistoren bevindt. De motor zou, gezien op de as, rechtsom moeten draaien. Indien hij anders draait moet je de aansluitingen omwisselen.
Na een succesvolle test kan de motor nu op het chassis gemonteerd worden. De motor wordt vastgeschroefd met twee klemmetjes, die passen over twee van de drie kunststof assen die de tandwielhouders van het motordeel met elkaar verbinden. |

We hebben nog vier contactstrips nodig om de uiterste standen van de wisselbeweging te kunnen doorgeven aan de elektronica. In ons voorbeeld werden die gerecycleerd uit een afgedankt relais uit een telefooncentrale. Uit datzelfde telefoonrelais hebben we ook enkele isolerende, geperforeerde plaatjes gerecycleerd. Deze zijn uit een soort printplaatmateriaal gemaakt.
|

Drie van deze stukjes isolatie materiaal worden aan weerszijden van een 40mm lange M3-afstandshouder en twee M3-moertjes geplaatst.
Tussen deze isolerende stukjes worden de contactstrips geplaatst. Op deze wijze verkrijg je een U-vormig werkstuk.
|
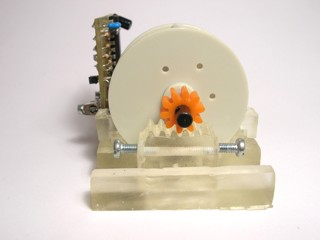
We moeten eerst ons tandwielblokje kunnen laten bewegen, en daar is een tandwieltje voor nodig op de as van ons motordeel.
De houder van de contactstrips lijmen we nu vast aan het motordeel.
|
De strips zelf kunnen we nu uitlijnen met de stelschroeven van het beweegbare tandwielblokje. Het gat doorheen het uiteinde van de contactstrips van een telefoonrelais is daarvoor bijzonder handig. Eens de strips goed uitgelijnd zijn, kunnen we ze fixeren met de boutjes aan de vastgelijmde afstandshouder, maar ook best met wat lijm. Het is immers de bedoeling dat de strips niet opzij schuiven bij de definitieve afregeling van de wisselmotor, na de plaatsing van de wisselmotor onder de spoorbaan.
|

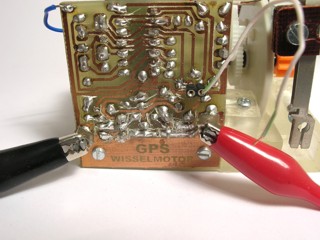
We gaan de contactstrips nu aansluiten aan de printplaat: we beginnen met de gemeenschappelijke pool: de beide binnenste strips worden met elkaar verbonden.
Deze gemeenschappelijke pool verbinden we verder met de enkelpolige aansluiting op het printplaatje. Als draad gebruiken we, net als bij de motoraansluiting, een signaalkabeltje met volle kern.
|
De minpool van de schakelcontacten solderen we aan de contactstrip die het verst van het printplaatje verwijderd is en verbinden we met een massapunt op de printplaat. De pluspool van de schakelcontacten, aan de kant van de printplaat, wordt nu ook van een draadje voorzien dat we met de print verbinden aan de positieve spanning. De positieve pool van de kleine condensator is hiervoor een geschikte aansluitplaats.
|
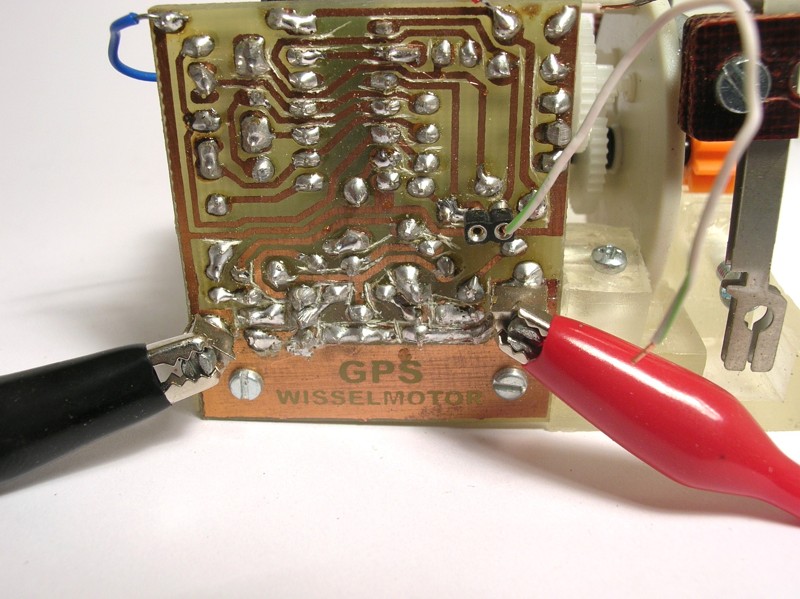
We leggen nu opnieuw, zoals toen we de motor voor het eerst testten, een voedingsspanning aan. Het tandwielblokje zou nu langzaam moeten verschuiven in de richting van de printplaat en daar stoppen nadat het de contactstrips tegen elkaar heeft gedrukt. Het draadje rechts in de tweepolige connector is onze stuurspanning: wanneer we die aan de positieve voedingsspanning leggen zal de motor andersom draaien tot hij tegen de andere contactstrips komt. De linkse connector voert het terugmeldingssignaal uit.
We kunnen nu de maximale uitslag van dit blokje in beide richtingen afregelen met behulp van de stelschroeven en/of door de contactstrips wat te verbuigen.
Belangrijk: bij het afregelen van de stelschroeven GEEN voedingsspanning gebruiken! |

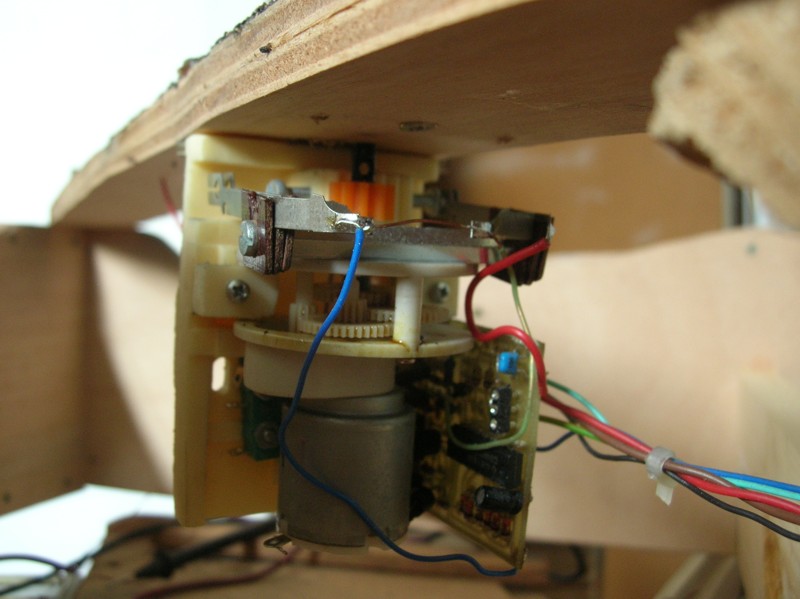
Eens de afregeling ruwweg gebeurd is, kan de motor zijn plaats krijgen onder de baan.
De mechanische verbinding met een wissel kan op diverse wijzen gebeuren. Het eenvoudigst is een stukje veerdraad in een vooraf geboord gaatje in het tandwielblokje. Deze veerdraad gaat dan doorheen de sleuf in bodem van het chassis en beweegt dan verder de stelbiels van je wissel. De wisselmotor kan ook rechtopstaand geplaatst worden, waarbij de veerdraad in de verticale zijde van het tandwielblokje wordt bevestigd. |
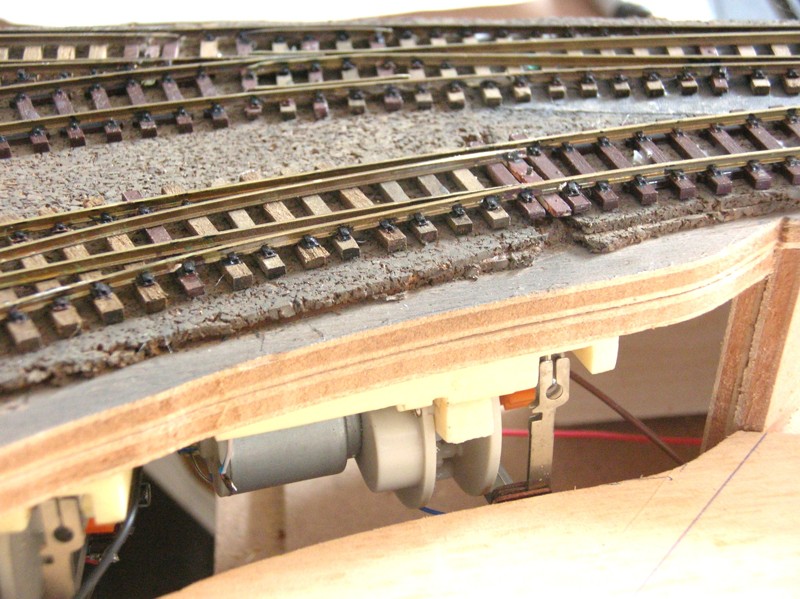
Na de definitieve plaatsing en afregeling van de wisselmotor kan ons wissel mooi langzaam en behoorlijk geruisloos op afstand verzet worden. Uiteraard kan deze aandrijving ook voor andere doelen gebruikt worden, zoals het omzetten van mechanische seinen of het bewegen van andere delen van je baan.
We geven het toe: dit project is verre van eenvoudig. We begrijpen het dan ook zeker dat niet elke lezer dit meteen of volledig zal nabouwen. Niettemin hopen we door deze bijdrage mensen op ideeën te brengen om de bediening van hun baan te verbeteren. Hoe U dit idee dan ook gebruikt: succes ermee!
|
Wat voorgeschiedenis, over een eerder prototype:
Mijn eerste wisselsturingen waren opgebouwd met
behulp van verbouwde telefoonrelais, gesloopt uit delen van een centrale.
Deze bleken al snel niet te voldoen, dus was er een alternatief nodig. Dit
werd uiteindelijk een eigen ontwerp.
Ik had steeds al een afkeur van de standaard wisselmotoren,
opgebouwd met spoelen. De eindafschakeling ervan - indien al aanwezig - is
vaak onbetrouwbaar met doorbranden tot gevolg. De werking zelf van zo'n omzetter
is vaak ook zwak en bovendien zijn ze behoorlijk lawaaierig.
boven: telefoonrelais, omgebouwd en gebruikt als wisselomzetters
Toen op het werk de oude telefooncentrale werd vervangen, redde ik zo'n 150
telefoonrelais van de schroothoop, met de bedoeling ze op mijn baan te gaan
gebruiken. Een constructie met een stukje gordijnrail zorgde voor een hefboom,
de schakelaars van het relais dienden voor de terugmelding naar het bedieningspaneel
en voor de ompoling van het hartstuk. Niet slecht, maar ze hadden als nadeel
dat ze toch behoorlijk lawaaierig waren, een gevaarlijke voeding van 48V gelijkspanning
nodig haden, en lastig te plaatsen en af te regelen. Bovendien bleken ze niet
stabiel: onder invloed van temperatuurschommelingen was er vaak een nieuwe afregeling
nodig. Ik had een betere oplossing nodig.
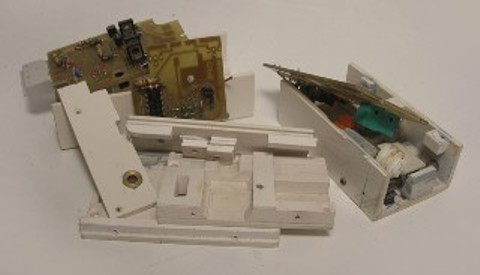
Links de resultaten van diverse pogingen, rechts het uiteindelijke
prototype, met zicht op het binnenwerk.
De bestaande wisselmotoren (Bemo, Fulgurex, ...) zijn met hun
15 tot 20 Euro behoorlijk duur, zeker als je bedenkt dat ik zowat 100 wissels
op mijn baan heb gepland. Ik zou een eigen wisselmotor gaan ontwerpen. Dit bleek
allesbehalve een eenvoudige opdracht. Het zoeken naar geschikte tandwielen (degelijk
én betaalbaar) duurde lang, een geschikte motor vinden ook. Zoals je
linksboven op de foto ziet, waren er heel wat prototypes nodig voor ik een goede
constructie én een goede aansturingselektronica voor mekaar had. De motor,
tandwieltjes en microschakelaars vond ik uiteindelijk bij Opitec. De elektronica
is een eigen ontwerp, de logica werd rond een CMOS 40106 opgebouwd, de eindsturing
via een H-brugschakeling met darlingtons.
Het protype gesloten en werkend, rechts de mallen voor de
kleinserieproductie.
Het geheel is zo opgebouwd dat het via een halfreliëf siliconenmal kopieerbaar
is. Na montage heb je een U-vormige doos, waarbij de elektronica als deksel
hiervoor dient. Door de onderdelen zorgvuldig te kiezen heb ik de kostprijs
behoorlijk kunnen drukken, terwijl de kwaliteit toch zeker behoorlijk is. Door
de constructie en de aansturingselektronica heeft de wisselmotor de volgende
eigenschappen:
Mechanische
eigenschappen:
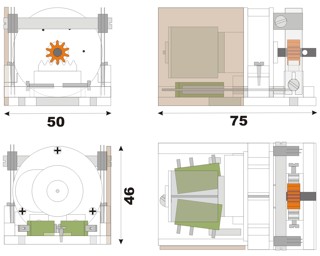
- compact: slechts 35 x 50 x 80 mm
- beweging (uitslag) instelbaar tussen 2 en 12mm
- zowel links als rechts eindpunt afregelbaar
- op diverse manieren te plaatsen en mechanisch aan te sluiten
- trage omschakeling (5mm per seconde)
- robuuste uitvoering, reproduceerbaar
|
Elektrische eigenschappen:
- voedingspanning: 5v DC
- aansturing met logische 0 en +5V
- échte terugmelding met logische 0 en +5V
- mogelijkheid tot plaatsen van meerdere microschakelaars
- nauwelijks stroomverbruik in rust, 200 mA bij omschakeling
En ... goedkoop (circa 8 Euro aan bouwmateriaal) |
Links een bijna afgewerkt serie-exemplaar, rechts twee geplaatste,
nog aan te sluiten motoren
.... en bij het aansluiten onder de baan merkte ik het lawaai door het klankkast-effect van de houten onderbouw ...